
Imagine trying to pick up a dime while wearing thick rubber diving gloves. Now imagine those gloves are inflated like balloons, fighting every inch of your finger’s movement with the force of several pounds per square inch. This is the daily reality for astronauts performing Extra-Vehicular Activities (EVAs). The spacesuit glove is one of the most complex and critical components of an astronaut's life-support system, yet it remains the primary bottleneck for manual dexterity in space.
The core problem isn't just bulk; it's physics. A gas-pressurized glove naturally wants to expand into a sphere. To bend a finger, an astronaut must overcome the internal pressure of the suit, typically around 4.3 psi (29.6 kPa) for U.S. suits, plus the resistance of multiple protective layers. This creates significant torque at the joints, leading to rapid fatigue and reduced precision. Understanding why these gloves are so difficult to use requires looking at the conflicting demands placed on them: they must seal against a vacuum, protect against extreme temperatures and micrometeoroids, and still allow the wearer to operate delicate tools.
The Physics of the Inflated Hand
To understand the struggle, you have to look at the numbers. In a standard NASA Extravehicular Mobility Unit (EMU is the primary spacesuit used for spacewalks by NASA astronauts), the internal pressure is maintained at roughly 4.3 psi. At this pressure, the force required to flex a single finger joint can reach between 0.4 and 0.7 Newton-meters of torque. For context, this is several times higher than the force needed to flex a normal leather work glove at sea level.
This mechanical resistance translates directly into lost time and increased error rates. Studies conducted by NASA and academic institutions show that tasks requiring fine motor skills-like installing small fasteners or mating fluid connectors-can take two to three times longer in pressurized gloves compared to bare hands. The Purdue Pegboard Test, a standard measure of manual dexterity, consistently shows degraded performance when subjects wear simulated pressurized gloves. The issue isn't just speed; it's accuracy. Reduced tactile feedback means astronauts often rely more on vision than touch, increasing cognitive load during already stressful operations.
Layered Protection vs. Flexibility
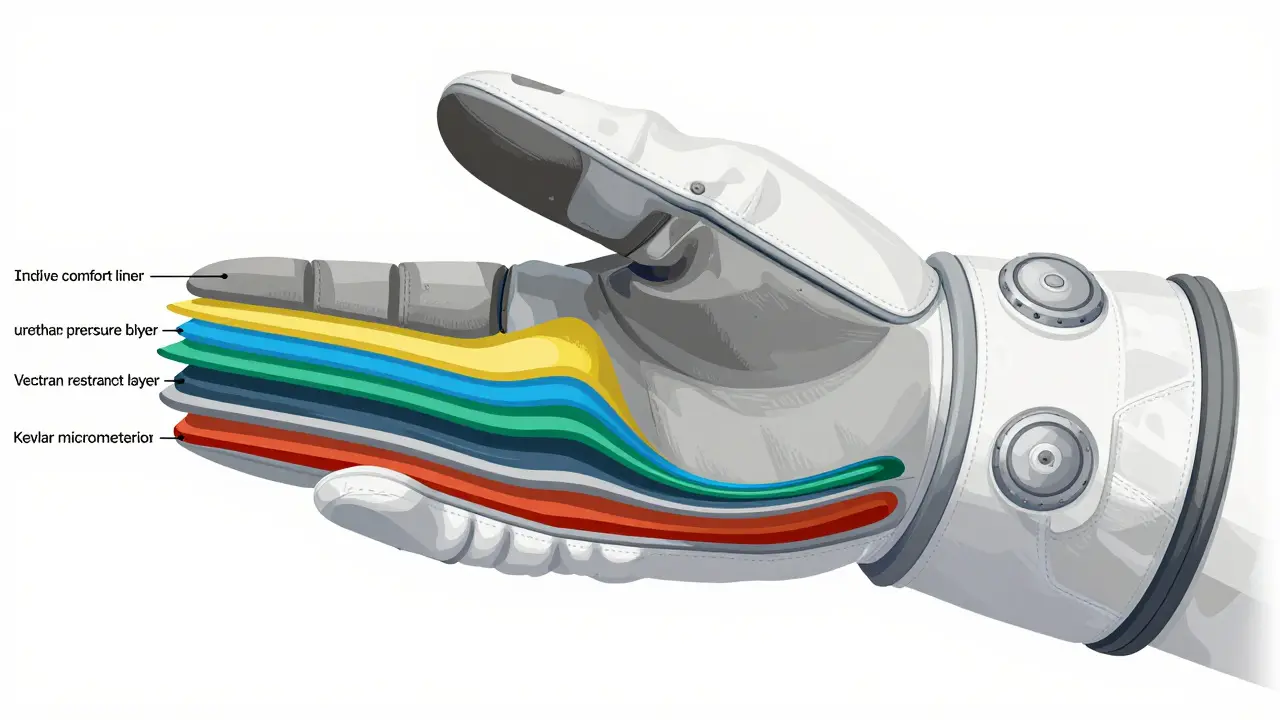
You cannot simply make the glove thinner to improve dexterity. The environment outside the International Space Station is lethal. The glove must serve as a personal spacecraft. A typical EMU Phase VI glove consists of five to seven distinct layers, each adding stiffness and friction:
- Inner Comfort Liner: Manages moisture and provides a soft interface with the skin.
- Pressure Bladder: Usually made of urethane or neoprene, this layer holds the life-saving gas. It is elastic but resists stretching.
- Restraint Layer: Made from high-strength fabrics like Vectran or Dacron, this layer prevents the bladder from bursting under pressure. It bears the structural loads.
- Thermal Control: Layers of aluminized Mylar reflect heat and cold, protecting the hand from temperature swings ranging from -150°C in shadow to +120°C in sunlight.
- Micrometeoroid Protection: An outer shell of Nomex or Kevlar stops tiny debris traveling at speeds over 7 km/s.
The cumulative thickness of these layers, particularly at the fingertips, can exceed 5 mm. Human skin has less than 1 mm of soft tissue between mechanoreceptors and the surface. That extra 4-5 millimeters of material dampens vibration and pressure signals, making it nearly impossible to feel the texture of a rock or the click of a latch. During the Apollo missions, engineers tried using thin silicone rubber pads on fingertips to improve tactility, but this compromised puncture resistance-a dangerous trade-off in the harsh lunar environment.
Historical Evolution: From Gemini to Artemis
The design challenges we face today were first encountered in the 1960s. The Soviet "Berkut" suit and NASA’s Gemini G4 suit featured the first orbital EVA gloves. These early designs were bulky and stiff, offering minimal dexterity. Astronaut Edward H. White II, who performed the first American spacewalk in 1965, described his hand as feeling like a "dead weight."
The Apollo A7L gloves represented a significant improvement. Operating at a lower pressure of 3.7 psi, they allowed Neil Armstrong and Buzz Aldrin to collect rock samples. However, even these improved gloves caused significant hand fatigue. Astronaut Harrison Schmitt reported severe discomfort during geological sampling on Apollo 17. The lower pressure helped dexterity but increased the risk of decompression sickness if the suit was breached, forcing designers to balance safety against usability.
Modern ISS gloves (Phase VI) operate at higher pressures for safety but use advanced materials to mitigate stiffness. Looking forward, the Artemis program’s xEMU (Exploration Extravehicular Mobility Unit) aims to reduce joint torque through better patterning and anthropometric fit. Contractors like Axiom Space and Collins Aerospace are developing next-generation gloves that promise improved range of motion, though quantitative benchmarks remain proprietary.
The Human Factor: Fit and Fatigue
Dexterity is not just about the glove’s mechanics; it’s about how well it fits the human hand. Astronauts vary widely in hand size, from the 5th percentile female to the 95th percentile male. Gloves must seal to hard wrist rings that come in discrete sizes, often forcing compromises in fit. Poor fit leads to concentrated pressure points, causing nail delamination and skin abrasion-common injuries documented in NASA medical records.
A 2018 study by Texas Tech University found that while static fit easement (the gap between hand and glove) didn’t significantly impact dexterity metrics in lab tests, it did affect subjective comfort. More importantly, the study confirmed that pressure, not just bulk, is the dominant source of dexterity loss. Unpressurized gloves of similar thickness only slowed task completion by 10-20%, whereas pressurized gloves increased times by 50-100%.
Fatigue is a major operational constraint. Using a pistol-grip power tool to drive bolts requires sustaining grip forces of 100-150 Newtons to counteract reaction torques. In a stiff glove, this effort drains energy quickly, potentially limiting EVA duration below the nominal 6.5-7.5 hours. Astronauts Chris Hadfield and Mike Massimino have both described their hands as feeling "tired and bruised" after long spacewalks, highlighting the physical toll of fighting the suit’s pressure.
| Era/Suit | Pressure (psi) | Key Material Innovation | Dexterity Impact |
|---|---|---|---|
| Gemini (1960s) | ~5.0 | Rubber bladder | Very Low; high fatigue |
| Apollo (1960s-70s) | 3.7 | Silicone fingertip pads | Moderate; improved tactility |
| ISS EMU Phase VI | 4.3 | Vectran restraint, Mylar thermal | Low; high torque resistance |
| Artemis xEMU (Future) | 4.3 | Advanced patterning, new textiles | Targeted Improvement |
Alternative Solutions: Beyond Gas Pressure
Engineers have explored radical alternatives to traditional gas-pressurized gloves. One promising concept is Mechanical Counter-Pressure (MCP), pioneered by MIT researcher Dava J. Newman. The "BioSuit" concept uses tight-fitting elastic garments to apply pressure directly to the body, eliminating the need for large volumes of gas. MCP gloves could theoretically offer much lower flexion torque because there is no gas to displace during movement. However, maintaining uniform pressure across complex hand geometries without cutting off circulation is technically challenging, and no MCP glove has flown operationally.
Another avenue is powered assistance. NASA and General Motors developed the "RoboGlove," which uses electric actuators to multiply grip strength. While not designed for vacuum, similar technologies could assist astronauts in flexing stiff pressurized fingers. The challenge lies in integrating power sources, electronics, and actuators into a lightweight, reliable package that can survive a 6-hour EVA. As of 2023, no powered EVA glove has been adopted due to complexity and reliability concerns.
Training for the Impossible
Because technology hasn't fully solved the dexterity problem, training becomes the primary countermeasure. Astronauts spend hundreds of hours in the Neutral Buoyancy Laboratory (NBL), practicing EVA tasks in full suits. They learn to manipulate tools with oversized handles (4-5 cm diameter) and triggers requiring less than 35 N of force. Color-coding and visual indexing replace tactile cues, allowing astronauts to rely on sight rather than touch. Even with extensive training, simple tasks like tying knots or aligning connectors within 1-2 mm remain frustratingly difficult.
Why are spacesuit gloves so stiff?
Spacesuit gloves are stiff because they are pressurized with gas (typically 4.3 psi) to keep the astronaut alive. This internal pressure pushes outward, resisting any bending of the fingers. Additionally, the gloves contain multiple layers of fabric and insulation to protect against extreme temperatures and micrometeoroids, adding further rigidity.
How does pressure affect dexterity?
Higher pressure increases the force required to flex finger joints. At 4.3 psi, the torque needed to bend a finger is several times higher than at sea level. This leads to rapid muscle fatigue and reduces the precision of hand movements, making fine tasks like operating small switches or collecting samples much slower and more difficult.
What is the BioSuit?
The BioSuit is a mechanical counter-pressure (MCP) spacesuit concept developed at MIT. Instead of using gas to pressurize the suit, it uses tight-fitting elastic materials to apply pressure directly to the body. This approach could significantly improve dexterity by removing the resistance of inflated gas, but it has not yet been used in operational spaceflight.
Can astronauts feel what they touch in space?
Tactile sensation is severely reduced. The multiple layers of the glove, which can be over 5 mm thick at the fingertips, dampen vibrations and pressure signals. Astronauts often cannot feel the texture of objects or the exact point of contact, relying instead on visual cues and specialized tool designs to ensure proper engagement.
How do future suits plan to improve dexterity?
Future suits like the Artemis xEMU focus on improved patterning, better anthropometric fit, and advanced materials to reduce joint torque. Researchers are also exploring mechanical counter-pressure systems and powered-assist gloves to mechanically aid finger movement, though these technologies are still in development.