
Imagine driving your car into a deep urban canyon where skyscrapers block the sky. Your GPS signal flickers and dies. Without help, you are blind to your exact position. Now imagine that same car gliding through the tunnel, maintaining centimeter-level accuracy because it remembers every turn and speed change from the last second. This is not magic; it is INS-GNSS integration, a technology that combines satellite data with internal motion sensors to create navigation that never quits.
We rely on Global Navigation Satellite Systems (GNSS) like GPS for our daily maps, but satellites alone have a fatal flaw: they need a clear view of the sky. When signals bounce off buildings (multipath), get blocked by trees, or are jammed intentionally, standalone GNSS fails. Enter the Inertial Navigation System (INS). By fusing INS with GNSS, we get the best of both worlds-the global reference of satellites and the continuous, high-speed awareness of inertia.
How INS-GNSS Integration Works
To understand why this combination is so powerful, you first need to look at the two players involved. On one side, you have the Global Navigation Satellite System (GNSS). This includes constellations like GPS, Galileo, GLONASS, and BeiDou. These systems provide absolute position, velocity, and time (PVT) updates. However, these updates are slow, typically arriving only once or twice per second (1-20 Hz). More importantly, they are fragile. A single tree branch can disrupt the signal.
On the other side sits the Inertial Measurement Unit (IMU). An IMU contains micro-electromechanical systems (MEMS) that measure acceleration and rotation. It usually has three accelerometers and three gyroscopes. Unlike GNSS, an IMU does not care about the sky. It works perfectly in a basement, underwater, or inside a tunnel. It samples data incredibly fast-often between 100 and 2000 times per second.
The "integration" part happens in software, specifically using a mathematical algorithm called a Kalman Filter. Think of the Kalman filter as a smart referee. It takes the precise but slow GNSS data and uses it to correct the drift of the fast but noisy IMU. At the same time, it uses the IMU’s rapid updates to fill in the gaps when GNSS signals disappear. The result is a navigation solution that is both globally accurate and locally smooth.
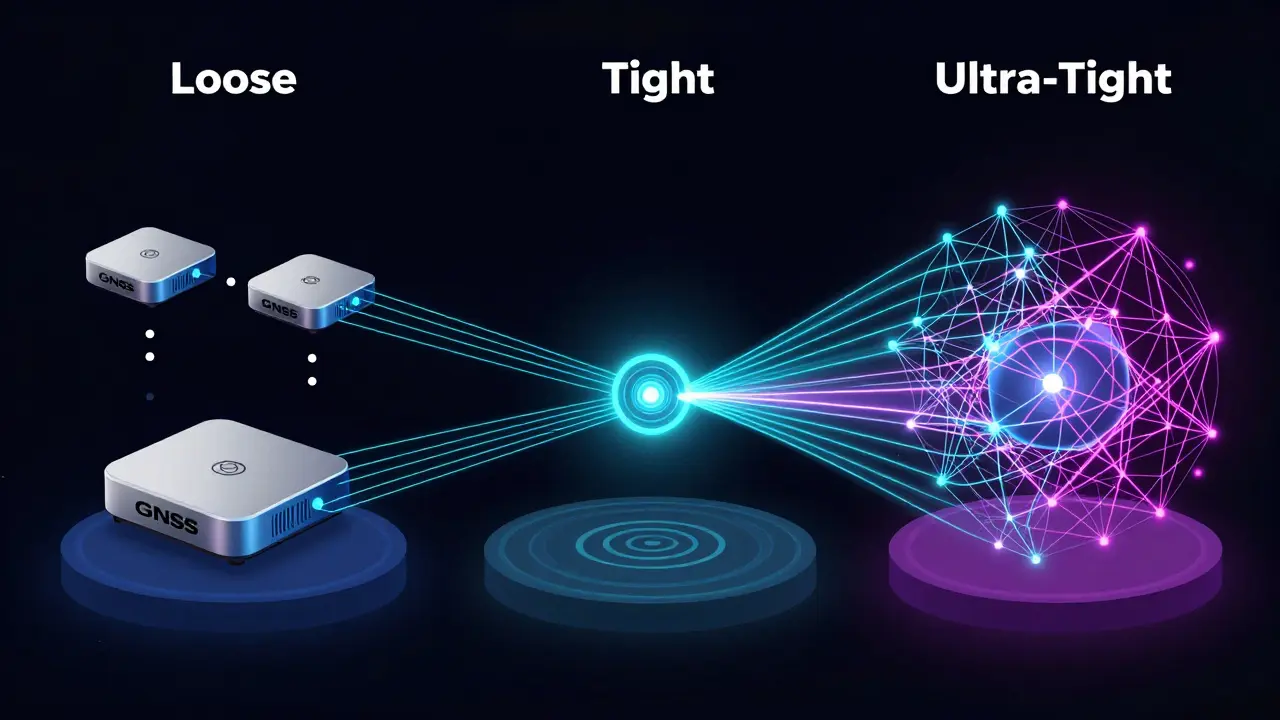
Levels of Coupling: Loose, Tight, and Ultra-Tight
Not all integrated systems are created equal. Engineers design these systems with different levels of "coupling," which determines how deeply the two sensors talk to each other. Understanding these levels helps explain why some drones crash in tunnels while others fly right through them.
- Loosely Coupled: This is the simplest method. The GNSS receiver calculates its own position and sends that final number to the INS. The INS then adjusts its path based on that point. It is easy to build but weak. If the GNSS loses lock on just four satellites, the whole system degrades rapidly.
- Tightly Coupled: Here, the raw data from the GNSS receiver (pseudoranges and Doppler shifts) goes directly into the Kalman filter alongside the IMU data. This allows the system to navigate even if it sees fewer than four satellites. It is much more robust against multipath errors in cities.
- Ultra-Tightly Coupled: This is the gold standard for defense and high-end autonomous vehicles. The INS actually helps the GNSS receiver track signals. If a satellite signal becomes very weak due to jamming, the IMU predicts where the signal should be, allowing the receiver to keep lock. This provides maximum resilience in hostile environments.
| Coupling Type | Data Used | Min. Satellites Needed | Robustness | Complexity |
|---|---|---|---|---|
| Loose | Final Position/Vel | 4+ | Low | Low |
| Tight | Raw Pseudorange/Doppler | 3 | Medium-High | Medium |
| Ultra-Tight | Correlator Outputs | 1-2 | Very High | High |
The Role of IMU Quality and Cost
The heart of any INS is the IMU, and not all IMUs are equal. The quality of your inertial sensors dictates how long your system can survive without satellite help. This is often measured by "bias instability"-how much the sensor drifts when it should be standing still.
For consumer applications like smartphones or basic fitness trackers, we use low-cost MEMS IMUs. These might cost under $100 but have a gyro bias instability of around 1-10 degrees per hour. In practical terms, this means if you lose GPS for 30 seconds, your position could drift by several meters. For most walking apps, this is acceptable.
In contrast, tactical-grade MEMS IMUs used in autonomous cars or surveying drones have a bias instability of 0.1-1 degree per hour. These units can maintain decimeter-level accuracy for up to a minute after losing GNSS. At the top end, Fiber Optic Gyros (FOG) or Ring Laser Gyros (RLG) offer instabilities below 0.01 degrees per hour. These are expensive-often costing $20,000 to $100,000-but they allow submarines and strategic aircraft to navigate for days without any external reference.
As MEMS technology improves, the gap is closing. Modern tactical-grade modules now weigh less than 100 grams and consume less than 3 watts of power, making high-precision navigation accessible to smaller robots and delivery drones.
Real-World Applications: Why Integration Matters
You might wonder why we bother with such complex engineering. The answer lies in specific industries where failure is not an option.
Autonomous Vehicles: Self-driving cars cannot afford to hesitate when entering a tunnel. A tightly coupled INS-GNSS system ensures the car knows its lane position instantly. Standalone GPS would take too long to reacquire signal, creating a dangerous blind spot. With IMU aid, the transition is seamless.
Hydrographic Surveying: Ships mapping the ocean floor use multibeam sonar. The ship rolls and pitches with the waves. If the attitude (tilt) measurement is off by just 0.1 degrees, the depth calculation at 50 meters can be wrong by nearly 9 centimeters. INS-GNSS provides real-time roll, pitch, and heading data at high frequencies, correcting for vessel motion instantly. This reduces post-processing time by hours and increases data reliability by over 20%.
Unmanned Aerial Vehicles (UAVs): Drones performing precision agriculture or infrastructure inspection need stable camera platforms. GNSS alone cannot provide the rapid attitude updates needed to stabilize a gimbal during aggressive maneuvers. The INS fills this gap, providing orientation data at 100+ Hz, while GNSS keeps the drone from drifting away geographically.
Challenges and Pitfalls in Implementation
While the theory is elegant, building a robust INS-GNSS system is tricky. Several common pitfalls can ruin accuracy if ignored.
Lever-Arm Calibration: The GNSS antenna and the IMU are rarely at the exact same physical location. On a car, the antenna might be on the roof, while the IMU is under the dashboard. This distance is the "lever arm." If the vehicle turns, the antenna moves in a wider arc than the IMU. Failing to calibrate this offset introduces significant errors, especially during dynamic maneuvers. You must measure this distance precisely and input it into the filter.
Time Synchronization: The IMU and GNSS must share the same clock. If there is a delay of just 1 millisecond between the IMU reading and the GNSS timestamp, a car moving at highway speeds (30 m/s) will calculate its position incorrectly by 3 centimeters. Over time, these tiny sync errors accumulate. Using hardware triggers to align timestamps is crucial.
Magnetic Disturbances: Many INS units include a magnetometer to determine heading (yaw). However, magnetic fields from car engines, bridges, or power lines can corrupt this data. Relying solely on magnetometers for heading in urban areas leads to drift. Advanced systems fuse wheel odometry or visual data to compensate when magnetic data is unreliable.
The Future of Sensor Fusion
The landscape of navigation is shifting toward multi-sensor fusion. While INS-GNSS remains the backbone, it is increasingly paired with cameras (Visual Odometry) and LiDAR. Recent studies show that adding monocular visual odometry to an INS-GNSS system can reduce horizontal positioning error by 30-50% in urban canyons.
Furthermore, researchers are developing "physics-informed" algorithms that understand human gait or vehicle dynamics. Instead of treating movement as random noise, these filters know that a pedestrian cannot move sideways faster than their stride length. This contextual awareness makes navigation robust even when GNSS is completely denied for extended periods.
As MEMS sensors continue to improve, we expect to see sub-degree attitude accuracy and centimeter-level positioning in devices that cost less than $500. This democratization of precision navigation will unlock new possibilities in robotics, augmented reality, and personal safety.
What is the main advantage of INS-GNSS integration over standalone GPS?
The main advantage is continuity and robustness. Standalone GPS fails when signals are blocked (e.g., in tunnels or urban canyons). INS-GNSS uses the IMU to bridge these gaps, providing continuous, high-frequency position and attitude data even when satellite signals are lost temporarily. It also provides orientation (roll, pitch, yaw) which GPS alone cannot do accurately.
How long can an INS work without GNSS?
It depends on the quality of the IMU. Low-cost MEMS IMUs may drift significantly within 10-30 seconds. Tactical-grade MEMS IMUs can maintain useful accuracy for 1-2 minutes. High-end Fiber Optic Gyros (FOG) can operate for hours or even days with minimal drift. The longer the outage, the more the error grows due to integration of sensor biases.
What is the difference between loose and tight coupling?
In loose coupling, the GNSS receiver outputs a final position fix, which the INS uses for correction. In tight coupling, raw satellite measurements (pseudoranges) are fused directly with IMU data in the Kalman filter. Tight coupling is more robust because it can function with fewer visible satellites and better rejects multipath errors.
Why is lever-arm calibration important?
Lever-arm calibration accounts for the physical distance between the GNSS antenna and the IMU center. During turns or acceleration, these two points experience different motions. Incorrect calibration leads to systematic errors in position and attitude, especially during dynamic maneuvers. Precise measurement of this offset is critical for high-accuracy applications.
Can INS-GNSS work indoors?
Purely indoors, no, because GNSS signals do not penetrate buildings well. However, INS-GNSS is excellent for "seamless" indoor-outdoor navigation. As you enter a building, the INS takes over using its internal sensors. To prevent drift indoors, advanced systems combine INS with Wi-Fi fingerprinting, Bluetooth beacons, or Visual Odometry (cameras) to constrain the error growth.