
Imagine sending a robot to the surface of Mars. You build it with the best materials, test it for years on Earth, and launch it into orbit. But once it lands, the environment tries to destroy it. Sharp rocks tear its wheels. Radiation flips bits in its computer memory. A joint seizes up because of extreme cold. In space robotics, we don't ask if something will fail. We ask how it will fail, and more importantly, how the robot keeps working when that happens.
This is the core of failure modes and redundancy design. It’s not just about adding backup parts; it’s about creating systems that can absorb shocks-mechanical, electrical, or software-and keep moving toward their goals. Whether it’s a rover crawling across alien terrain or an arm capturing a satellite in orbit, these machines rely on layered safety nets to survive the unforgiving void.
Understanding Failure Modes in Extreme Environments
To design for survival, engineers first map out every way a system could break down. This process is called Failure Modes and Effects Analysis (FMEA). In space, failures aren’t random; they follow predictable patterns based on physics and material science.
Mechanical failure is perhaps the most visible. Take the Mars Science Laboratory Curiosity, a six-wheeled rover that has been exploring Mars since 2012. Its aluminum wheels, only 0.75 millimeters thick, were designed to handle rough terrain. However, the Martian soil contained unexpectedly sharp basaltic rocks. Over time, these rocks punctured the wheel skins and bent the metal treads, known as grousers. By 2022, reports showed that Curiosity had four broken grousers and dozens of cracks in its wheel skins. This isn’t a sudden explosion; it’s progressive structural degradation. The failure mode here is fatigue and impact damage from abrasive terrain.
Actuator failures are another major concern. These are the motors and joints that move the robot. If a motor burns out or a gear strips, the limb stops moving. On the earlier Spirit rover, one front wheel became "balky," drawing significantly more electrical current than usual. This was an early warning sign of mechanical seizure or lubrication failure. Instead of ignoring it, mission controllers changed how they drove the rover, reducing the duty cycle of that specific wheel to prevent total lockup.
Sensing and computation failures are less visible but equally dangerous. Solar radiation can cause single-event upsets in computer memory, flipping a 0 to a 1. This might make a sensor report a false temperature reading or cause a navigation algorithm to crash. Without protection, a simple bit flip could send a rover off a cliff.
The Three Layers of Redundancy
Redundancy is the antidote to failure. But in space, you can’t just carry spare tires like you would in a car. Mass is expensive, and power is limited. Engineers use three main types of redundancy to balance reliability with resource constraints.
| Type | Description | Best For |
|---|---|---|
| Passive (Cold Spare) | A backup component sits idle until needed. It draws no power until activated. | Critical electronics like flight computers where heat dissipation is a concern. |
| Standby (Warm Spare) | The backup is powered on and ready to take over instantly if the primary fails. | Communication systems and real-time control loops requiring zero latency switch-over. |
| Active | Multiple components work simultaneously, sharing the load. If one fails, the others compensate immediately. | Propulsion systems and robotic arms where continuous force is required. |
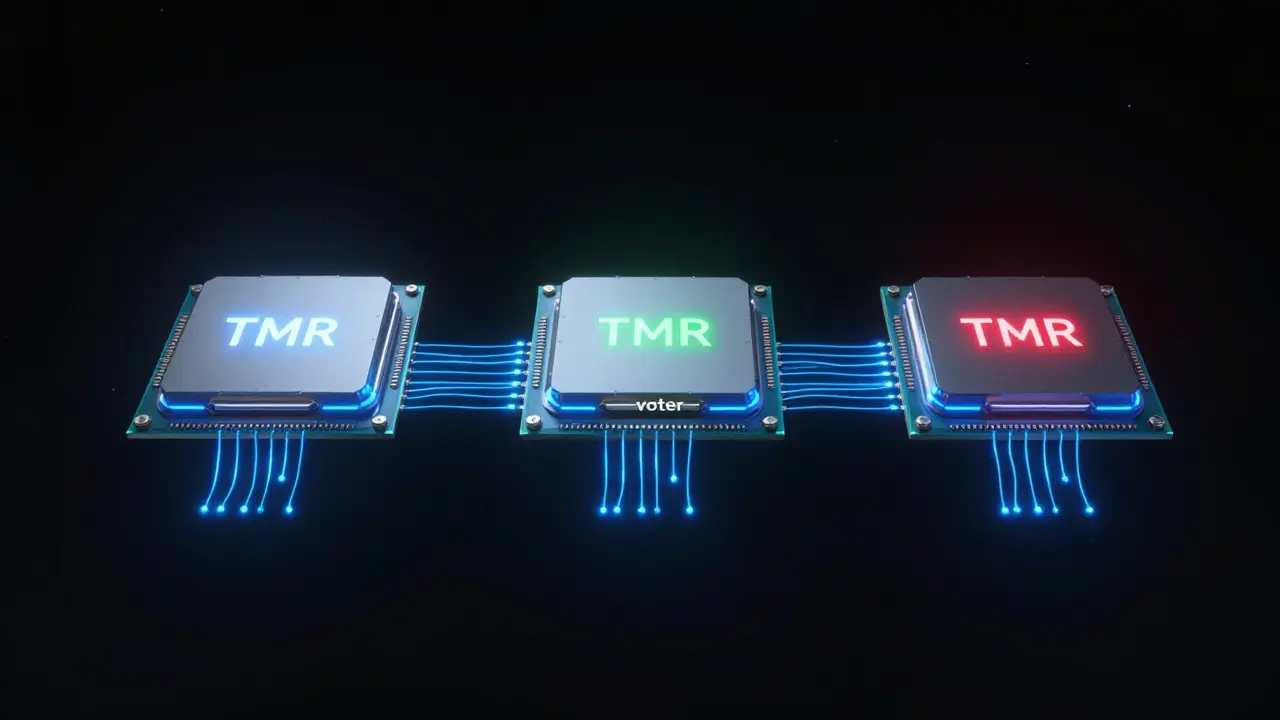
NASA follows a strict rule of thumb: no single failure should endanger the mission, and no dual failure should endanger the crew. This principle drives the architecture of almost all space robotics. For example, many spacecraft use Triple Modular Redundancy (TMR) for computing. Three separate processors run the same code simultaneously. A voter circuit compares their outputs. If one processor gives a wrong answer due to radiation, the other two agree on the correct one, and the outlier is ignored. This eliminates single-point failures in logic.
Kinematic and Control Redundancy: Smarter Than Just Spares
Hardware redundancy has limits. You can only add so many extra motors before the robot becomes too heavy. That’s why modern space robotics relies heavily on kinematic and control redundancy. This means designing the robot’s geometry and software so that it can complete tasks even if parts of it stop working.
Consider a robotic arm used for on-orbit servicing. If it has seven joints but only needs five to reach a target, it is kinematically redundant. Recent research, including studies published in Frontiers in Robotics and AI in 2021, shows how engineers plan "fail-safe trajectories." These are paths calculated beforehand that remain feasible even if one joint locks up. The arm doesn’t need a spare joint; it just needs to know how to move its remaining joints differently to achieve the same result.
Control redundancy takes this further. In 2026, new fault-tolerant control strategies using game theory were introduced. These algorithms treat actuator faults as adversaries. The controller constantly adjusts its commands to minimize error, guaranteeing that the robot reaches its goal within a specific time frame, even if a motor loses strength. This is analytic redundancy-the intelligence in the code compensates for weakness in the hardware.
Operational Redundancy: Adapting to Damage
Redundancy isn’t just built into the machine; it’s also built into the mission operations. When Curiosity’s wheels started tearing apart, NASA didn’t land a new rover. They changed how they drove it. Mission planners began avoiding fields of sharp rocks and slowing down the traverse rate. This is operational redundancy: using human ingenuity and flexible planning to extend the life of a damaged system.
Similarly, when Spirit’s wheel drew high current, operators reduced its usage. They effectively turned a six-wheel drive into a five-wheel drive configuration. This procedural flexibility is a critical layer of defense. It acknowledges that while we can predict failure modes, we cannot always prevent them. So, we design missions that can degrade gracefully rather than failing catastrophically.
Designing for Fault Tolerance: A Step-by-Step Approach
If you’re designing a space robot, you don’t start with redundancy. You start with analysis. Here is how engineers approach fault-tolerant design:
- Identify Single Points of Failure: Use Fault Tree Analysis (FTA) to trace back from a potential disaster (e.g., loss of mobility) to its root causes. Every path must be cut by a redundant component or procedure.
- Define Degraded Modes: Clearly specify what the robot can still do after a failure. Can it still communicate? Can it still move slowly? Define these "safe" states explicitly.
- Select Redundancy Type: Choose between passive, standby, or active redundancy based on mass, power, and switching speed requirements. Active redundancy is preferred for dynamic systems like arms; passive is better for static backups.
- Implement Watchdogs: Add software timers that reset the system if a process hangs. This prevents software crashes from becoming permanent failures.
- Test Under Fault Injection: Don’t just test the happy path. Deliberately cut wires, block sensors, and freeze joints during testing to ensure the system reacts as expected.
Why This Matters for Future Missions
As we look toward lunar bases and Mars sample returns, the stakes get higher. Robots will be building habitats, repairing satellites, and handling hazardous materials. They can’t afford to stop. The shift from simple hardware duplication to integrated kinematic and control redundancy represents a maturation of the field. We are moving from robots that are merely tough to robots that are resilient.
The lessons learned from Curiosity’s torn wheels and Spirit’s balky joints are now baked into the design of next-generation explorers. By combining robust mechanical margins with intelligent software that can reconfigure itself in real-time, we create machines that don’t just survive failure-they adapt to it.
What is the difference between redundancy and fault tolerance?
Redundancy refers to having extra components or pathways (like a backup engine). Fault tolerance is the system's ability to continue operating correctly despite those failures. Redundancy is a tool used to achieve fault tolerance. A system can have redundancy but poor fault tolerance if the switching mechanism fails.
How did Curiosity's wheel damage affect its mission?
The damage forced NASA to change driving strategies. They avoided sharp rocks and reduced daily travel distances. Despite the tears and broken treads, the rover continued its scientific mission because the remaining structural margin and operational adjustments provided enough redundancy to keep moving.
What is Triple Modular Redundancy (TMR)?
TMR is a technique where three identical components perform the same task simultaneously. A voter circuit compares their outputs and selects the majority result. If one component fails due to radiation or error, the other two override it, ensuring correct operation without interruption.
Can software fix mechanical failures in space robots?
Software cannot repair physical damage, but it can mitigate its effects through control redundancy. For example, if a joint locks, advanced algorithms can recalculate trajectories using the remaining functional joints to complete the task, effectively bypassing the mechanical failure.
Why is active redundancy preferred for robotic arms?
Robotic arms require continuous force and precise positioning. Active redundancy allows multiple actuators to share the load. If one fails, the others instantly compensate without any delay for switching, maintaining stability and task performance during dynamic movements.